I discussed OFC in another previous post, but a quick recap of the theory is that to make a movement the brain needs to optimize the motor commands it sends out to control both effort (or noise in the system) and error (i.e. how far off the target you are). So an optimal solution to reaching for a pint in the pub should involve the minimization of both error and effort to acquire the target in a timely manner.
In the study I’ll discuss today, the authors make the claim that if this optimization happens at all it is local, not global. That is, people tend not to optimize to find the best possible solution, but rather they optimize until they find one that works well enough and then stick to it – even when there’s a better solution overall. To investigate this, the experimenters attached participants to a robotic wrist device that pushed their wrist back and forth at a certain frequency. Participants saw a visual target on the screen and a cursor representing their wrist amplitude; they had to keep the amplitude below a certain level to keep the cursor in the target.
The task was rather cunningly set up so that the participants could perform it in one of two ways: either by co-contracting their wrist muscles strongly against the perturbation, or by relaxing the muscles, which obviously requires less effort. (For an analogy, imagine riding a bike down a cobbled hill; you can either make the handlebars really stiff or relax and let the jolting push you around a bit, but if you do something in the middle the jolting will make you fall over.) Participants were either given ‘free’ trials where they could choose which strategy to use, or ‘forced’ trials where they were pushed into a certain strategy at the start of the task by visual feedback.
After being given three ‘free’ trials they were then given three ‘forced’ trials in the strategy they didn’t pursue the first time, so if they had freely chosen the ‘relaxed’ strategy, they were pushed into the ‘co-contract’ strategy. Then they were given three more ‘free’ trials and then three more ‘forced’ trials in the other strategy, and finally three more ‘free’ trials. You can see a representative participant in the figure below (part of Figure 2A in the paper):
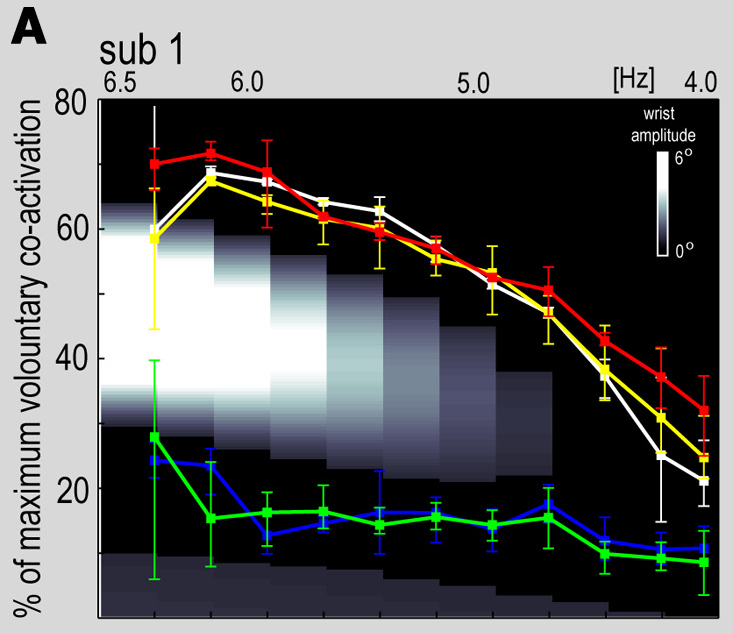
Co-activation in one representative participant across time
Here the dark areas are areas of low movement amplitude at certain levels of maximum voluntary co-activation – i.e. they’re the areas you want to stay in to perform the task correctly. If you co-contract too much or too little, you’ll end up in the white area in the middle and you’ll fail the task. The traces show the five sets of trials: the first ‘free’ set is white, then the first ‘forced’ set is blue, then the next ‘free’ set is green, then the next ‘forced’ set is yellow, and the final ‘free’ set is red. What you can see clearly from this graph is that participants tended to follow in the ‘free’ trials where they’d been pushed in the previous set of ‘forced’ trials, regardless of whether it was actually a lower-effort solution. That is, subjects tended to do what they’d done before, whether or not it was a better solution.
Sound familiar? Like in use-dependent learning, participants tended to do things they’d already done rather than make a new solution. And again, it makes sense to me that this would happen. The authors in this paper argue that the brain is forming ‘motor memories’ that are also used in the optimization process, and that the optimization itself is thus local and not global. I guess I can buy that, but only in the sense that these ‘motor memories’ are patterns of activation that have been learnt by the network. It takes metabolic energy to create new connections and learn a new pattern, so any optimization process would have to take this into account along with error and effort.
It might even explain the existence of straight line movements in non-optimal situations; if you’ve moved in straight lines all your life because it’s an efficient and effective way to move, then if you’re suddenly placed in an environment where moving in a straight line is more effortful and therefore non-optimal, it’s going to be very difficult to unlearn that deep network optimization you’ve been creating your whole life.
There’s more to the paper too, I think it’s great.
---
Ganesh, G., Haruno, M., Kawato, M., & Burdet, E. (2010). Motor memory and local minimization of error and effort, not global optimization, determine motor behavior Journal of Neurophysiology DOI: 10.1152/jn.01058.2009
Image copyright © 2010 The American Physiological Society
No comments:
Post a Comment